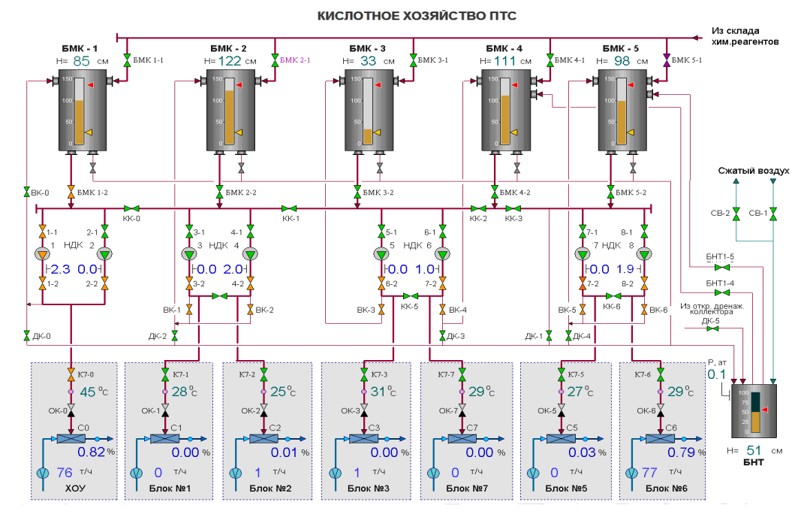
Основне призначення кислотного господарства — подача концентрованої сірчаної кислоти (92%) у кількостях, що забезпечують необхідну концентрацію кислоти в розчині (близько 1%), який подається на регенерацію Н-катіонових фільтрів блоків підживлення тепломережі та хімічної знесолювальної установки (ХЗУ). Кислота подається з мірних баків (МБК) за допомогою насосів-дозаторів (НДК) на змішувач (З), у якому змішується з сирою водою. Сигналом зворотного зв’язку в системі регулювання є концентрація кислоти після змішувача.
АСУ ТП забезпечує:
- автоматичний захист технологічного обладнання, зокрема:
- захист від перевищення рівня в баках-мірниках кислоти та в баку нижніх точок (БНТ);
- захист від підвищення тиску за насосами-дозаторами;
- захист від підвищення температури кислоти перед зворотними клапанами (ЗК);
- автоматичне керування виконавчими пристроями в межах задач пошагового логічного управління (ПЛУ):
- подача регенеруючого розчину на фільтри ХЗУ та БПТМ;
- заповнення баків-мірників кислотою;
- спорожнення БНТ у мірники;
- дистанційне керування виконавчими пристроями з комп’ютера оператором;
- автоматичне регулювання концентрації кислоти в регенеруючому розчині;
- попереджувальну та аварійну сигналізацію;
- архівування параметрів технологічного процесу;
- відображення поточної та архівної технологічної інформації.
Структура і функції АСУ
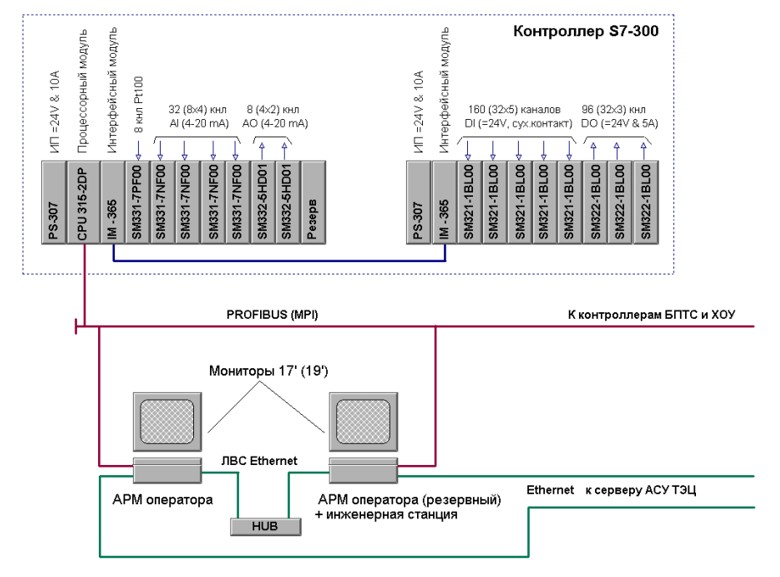
Система має дворівневу архітектуру. На нижньому рівні використовується контролер SIMATIC S7-315 2DP, оснащений сигнальними модулями SM-321, SM-322, SM-331 і SM-332. Загальна кількість модулів — 15 штук, що потребувало використання додаткової стійки розширення та інтерфейсних модулів IM 365. Програмне забезпечення контролера, що реалізує функції вводу/виводу, захистів та управління, розроблено за допомогою пакета STEP 7 і мови програмування S7-SCL.
Верхній рівень системи утворюють дві операторські станції, що резервують одна одну, на базі комп’ютерів Pentium 4 з 19” РК-моніторами. Вони працюють під управлінням ОС Windows і SCADA-системи TERMOCONT. Зв’язок між верхнім і нижнім рівнями системи реалізовано через MPI-інтерфейс із використанням OPC-сервера.