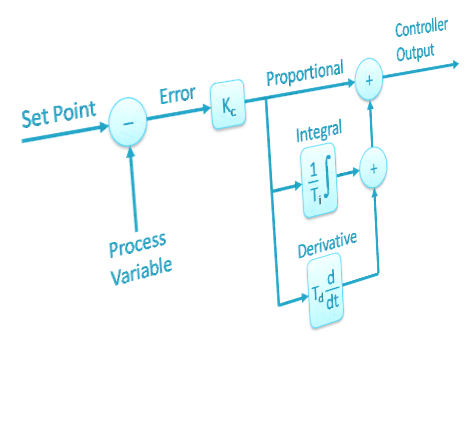
Контури регулювання з ПІД законом – це системи регулювання, які використовуються для регулювання та стабілізації деякого технологічного параметра ділянки виробничого процесу. Керуюча дія ПІД-закону регулювання складаються з трьох компонентів: пропорційної складової від сигналу розбалансу, інтегральної складової та похідної (швикості зміни) складової.
Існує багату методик налаштування систем з ПІД-регулятором. Налаштовувати ПІД можна за допомогою таких методів, як ручне налаштування, метод Циглера-Ніколса, налаштування на основі моделі або автоматичне налаштування для оптимізації продуктивності системи.
Ознайомитися з чотирма методами оптимізації налаштування ПІД відповідно до ChatGPT: Зіглера-Ніколса, Коена-Куна, внутрішнього керування моделлю (IMC) і прогнозованого керування моделлю (MPC) можна за посиланням: